Rotational motion
Extended objects can have translational and rotational motion. To describe the motion of an
unconstrained object, such as a football in flight,
it is most convenient to treat the motion as a combination of translational
motion of the center of mass and rotational motion about the center of mass.
The motion of an object constrained to rotate about a fixed axis, such as a door
rotating about a vertical axis defined by its hinges, is often more conveniently
described as a pure rotation about this axis. If this axis is not a
symmetry axis, the object exerts a force on the axis, and an external force is required to keep the
net force on the axis zero and the axis fixed.
In this laboratory you will become familiar with describing
rotational motion. You will investigate the
relationships between angular acceleration, moment of inertia, angular momentum
and torque. Finally you will examine a simple
model of a forearm.
Open a Microsoft Word document to keep a log of your experimental procedures, results
and discussions. This log will form the basis of
your lab report. Address the points highlighted in blue. Answer all questions.
Experiment 1
Stand up and make a fist. Gently swing your arm in a vertical circle, pivoting at
the shoulder and keeping the rest of the arm straight. Observe the
motion of the arm. Pay attention to the motion of the elbow and of
the hand.
Make the following measurements and record the data in your log:
- time it takes to complete 5 rotations
- distance from the shoulder to the elbow
- distance from the shoulder to the middle of the hand
Use your data to answer the following questions.
Motion of the hand
- How far in degrees did the hand travel during the five rotations?
- How far in radians did the hand travel during the five rotations?
- How far in meters did the hand travel during the five rotations?
- What was the average angular speed (deg/s and rad/s) of the hand?
- What was the average linear speed (m/s) of the hand?
- What was the average angular acceleration (deg/s2 and rad/s2) of the hand? How do you know?
- What was the average centripetal acceleration (m/s2)
of the hand?
Motion of the elbow
- Answer the same questions for the elbow.
- Which quantities are different and which quantities are the same for the
hand and the elbow?
Exploration
Use an on-line simulation from the University of Colorado PhET group to
investigate the relationships between angular acceleration, moment of inertia,
angular momentum and torque.
Link to the simulation:
http://phet.colorado.edu/en/simulations/torque
Click the Intro tab explore the interface.
- Use your mouse to apply a torque to the wheel for a short time interval
Δt to give the wheel an angular impulse and set it spinning.
- Slow the rotation rate with the brake.
- Watch the velocity and acceleration arrows for the bugs.
- Describe the direction of those arrows, while the
angular speed of the wheel is increasing, constant, or decreasing.
Click the Torque tab.
- Set the applied force equal to 1.5 N.
- Click Go let the simulation run for approximately 10 seconds.
- What is the magnitude and direction of the torque on the wheel?
- What happens to the lady bug?
- What provides the centripetal force to keep the bug moving in a circle?
- Why does this eventually fail?
- Click Reset All, and set the force to 0.5 N.
- Observe the acceleration vector after you click Go. How does it change?
- Will the acceleration vector ever point directly to the center? Why or why not?
- Click Reset All, and set the force to 0.5 N.
- Approximately 5 seconds after you click Go set the brake force to approximately 1 N.
- What happens to the acceleration vector?
Click the Moment of Inertia tab.
- Choose radians for the angular units.
- Set the scale of the torque graph to show a range of -20 to 20 Nm.
- Set the scale of the Moment of Inertia graph to show a range of -2 kg m2 to 2 kg m2.
- Set the angular acceleration graph to show -20 rad/s2 to 20 rad/s2.
- Put the mouse finger anywhere on the boundary between the green and pink circles.
- Hold down the left mouse button and move mouse. Look at the graph and try to apply a force that creates a torque of between 5 and 15 Nm.
- Use the ruler to measure the radius r of the boundary between the green and pink circles. Record r in your log.
- Calculate what the tangential component of the applied force must have been. Record Ftang in your log.
- Compare the torque τ and the angular acceleration α and calculate the moment of inertia I of the disk from τ
= Iα. Record I in your log.
- Compare with the moment of inertia displayed in the graph. Record the comparison in your log.
- Predict what will happen to the
moment of inertia if you keep the mass of the platform the same, but you
create a hole in the middle (increase inner radius). Record your
prediction.
- Set the inner radius equal to 2. Find the moment of inertia for this shape. Record it.
- Even when the force on the platform changes, the moment of inertia graph remains constant. Why?
Click the Angular Momentum tab.
- Choose radians for the angular units.
- Set the scale of the Moment of Inertia graph to show a range of -2 kg m2 to 2 kg m2.
- Set the angular speed to be 1 rad/s. This fixes the angular momentum unless you apply a torque.
- While the disk is moving, change the inner radius to 2 m. What happens to the moment of inertia and the angular velocity?
- Make some more changes to the inner radius, outer radius and mass of the disk. Describe what happens.
Experiment 2
 Take a meter
stick with a paper clip to which you can attach a weight. (If you cannot find
one, there are meter sticks, clips and weights in room 203, Nielsen Physics.)
Grab the stick on one end, and hold it horizontal, with the weight close to your
hand. Slide the weight out to other end. Does it become
harder to hold the stick horizontal? Why? You are holding up the same
weight.
Take a meter
stick with a paper clip to which you can attach a weight. (If you cannot find
one, there are meter sticks, clips and weights in room 203, Nielsen Physics.)
Grab the stick on one end, and hold it horizontal, with the weight close to your
hand. Slide the weight out to other end. Does it become
harder to hold the stick horizontal? Why? You are holding up the same
weight.
In this experiment, we will use the meter stick as an artificial forearm.
The arm (excluding the shoulder and wrist) is composed to two major segments. The upper arm is attached to
the shoulder. The forearm is attached to the upper arm at the elbow.
Let us only concentrate on situations where the upper arm is in the vertical
position. Then the forearm can move in two directions, upwards
or downwards.
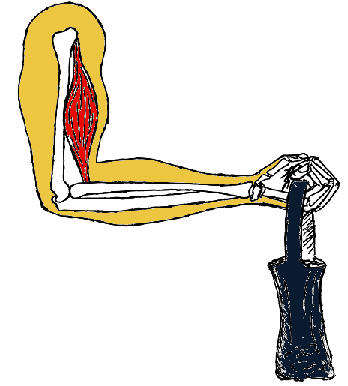
The upper-arm and the forearm can be thought of as two rigid levers, joined at the elbow which acts as a pivot point. Muscles
attached to these levers provide the force required to articulate their motion.
Since muscles can only provide force by contraction, they must always
work in pairs. As the contracting muscle, (red), tightens, it applies a
force to the arm. At the same time, the opposing muscle, (black), relaxes,
thus allowing the arm to move. We have a pair of simple levers.
When we lift a load with our biceps muscle, this muscle does positive work.
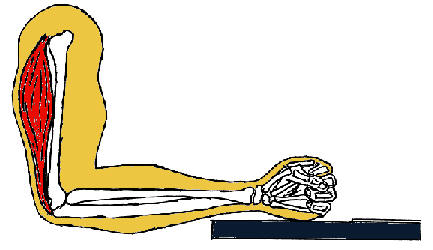
The triceps muscle does positive work when we push down on something.
There is also a third force on the forearm, the force the upper arm's bone exerts on the forearm at the elbow joint.
This force does no work, because the elbow joint is not moving.
Experiment:
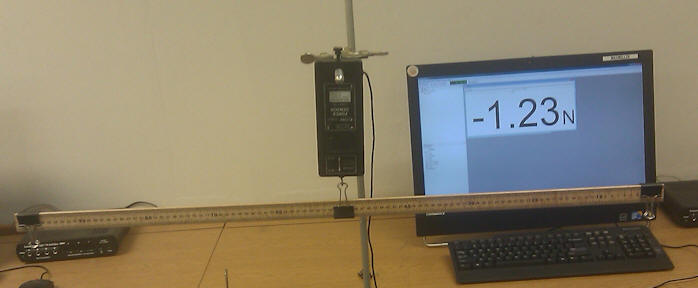
3 clips are attached to a meter stick, one at each end, and one in the middle
as shown in the figure below. The stick hangs from the force sensor. The force
sensor is used to measure the combined weight of the stick and the clips in
units of Newton (N). The minus sign indicates that the weight points downward. Enter the
magnitude of the weight into the table below.
The center clip is moved to a position ~25 cm away from the left edge of the
stick. Now the stick is no longer horizontal. You have to push down on the
left end of the stick to bring the stick to a horizontal position. To find
out how hard you have to push down to bring the stick to a horizontal
position, a mass hanger is attached to the clip on the left end. Masses are
loaded onto the mass hanger until the stick is horizontal. The combined
weight of the masses and hanger equals the force with which you have to push
down.
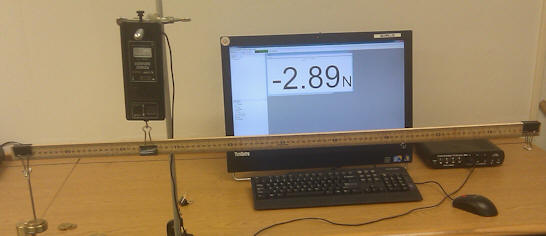
Record the magnitude of the reading of the force sensor
when the stick is again horizontal in the table.
The table already lists the relevant distances.
| weight of meter stick and clips |
|
| force sensor reading when stick is again horizontal |
|
| weight suspended from left clip |
|
| distance from left clip to CM of the meter stick |
0.47m |
| distance from force sensor hook to CM of meter stick |
0.27 m |
| distance d from force sensor hook tothe left clip |
|
Paste your table into your log.
Modeling the meter stick as a forearm and the force sensor as
the biceps, compare the force that the biceps has to exert to keep the forearm
horizontal to the force it has to exert to just support the weight of the
forearm. Comment on the relative magnitude of these forces.
List all the forces (magnitude and direction) acting on the
forearm (meter stick) and calculate all the torques (magnitude and direction)
exerted by those forces about the pivot point, when the stick is horizontal and
in equilibrium. Do all the torques cancel out?
Convert your log into a lab report.
Name:
E-mail address:
Laboratory 8 Report
- In one or two sentences state the goal of this lab.
- Insert your log with the requested table and the answers to the
questions in blue font.
Save your Word document (your name_lab8.docx), go to Canvas, Assignments, Lab
8, and submit your document.